Project NERO: An Experiment in Technology Transfer The University of Texas at Austin
Digital Media Collaboratory/Innovation Creativity and Capital Institute
Neuroevolution Group/Department of Computer SciencesBackground
In August 2003 the Digital Media Collaboratory (DMC) of the Innovation Creativity and Capital Institute (IC2) at the University of Texas held its second annual GameDev conference. The focus of the 2003 conference was artificial intelligence, and consequently the DMC invited several Ph.D. students from the Neuroevolution Group at the University's Department of Computer Science (UTCS) to make presentations on state-of-the-art academic AI research with potential game applications.The GameDev conference also held break-out sessions where groups brainstormed ideas for innovative games, and in one of the sessions Ken Stanley proposed an idea for a game based on a real-time variant of his previously published NEAT learning algorithm. On the basis of Ken's proposal the DMC/IC2 resolved to staff and fund a project to create a professional-quality demo of the game. (See production credits.) The resulting NERO project started in October 2003 and has continued through the present, generating several spin-off research projects in its wake. (See bibliography.)
As a result of the project we have imported the latest in AI research from the UTCS Neuroevolution Group into a commercial game engine, providing the DMC with a case study in technology transfer and a polished demo of an entertaining game.
The NERO Game
Our novel experimental game is called NERO, which stands for Neuro-Evolving Robotic Operatives. It is set in a fictional post-apocalyptic world, where robots struggle over the relics of human civilization.Although it resembles some RTS games, unlike most RTS games NERO consists of two distinct phases of play. In the first phase individual players deploy robots in a 'sandbox' and train them to the desired tactical doctrine. Once a collection of robots has been trained, a second phase of play allows players to pit their robots in a battle against robots trained by some other player, to see how well their training regimens prepared their robots for battle. The training phase is the most innovative aspect of game play in NERO, and is also the most interesting from the perspective of AI research.
Screenshot
Screenshot in training mode.
Here bipedal Enforcer-style NEROs are being trained in our Mountain Pass arena. When a brain is installed in an Enforcer for training, that robot enters play at a drop point near the crowded area at the right, and the brain is scored on how well the robot performs before the brain's timer expires. These Enforcers have already been trained to approach enemies; several can be seen crowded around the target labeled E1 to the left, and many more are on their way. Now the player is using the reward controls (lower right) to set up for additional training that will keep this team from approaching the enemy too closely. Many other options are also available on the control panel. (A similar object-placement control panel at the lower left has been retracted to improve visibility.)Training for complex tactical behaviors will require a player to think out and implement a shaping plan, leading the robots through a series of sandbox scenarios that guide them stepwise to the desired battlefield doctrine. (See figure below.)
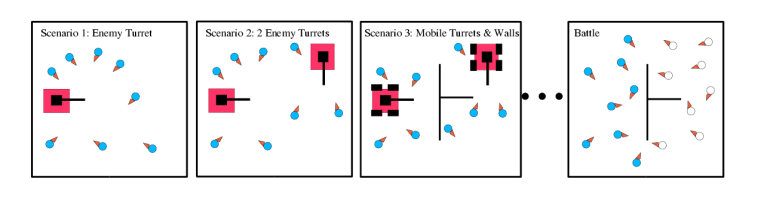
Example training regimen for a team of robots.
The player starts the naive robots in a simple environment and progressively adds more powerful enemies and more complex obstacles to the environment until the robots are experienced veterans, ready to be deployed against another player's robotic army.In battle, you put your trained team to the test. You can play a battle against the computer or against a human opponent on a local area network or the internet. On some servers, the player can place a flag interactively during the battle.
Screenshot
Screenshot in battle mode (detail).
Two trained teams are engaged in our Orchard arena, where a long wall down the center separates the two teams' starting positions but leaves room to go around either end. The Red Team (right) was trained to face the enemy and fire from a safe distance, and the Blue Team (left) was trained to chase down enemies while navigating obstacles such as the wall. Here the Blue Team has formed into single file while negotiating the turn at the end of the wall, and now assaults the Red Team, which has assumed a defensive posture. The smoke is color-coded to indicate which team is firing; the image shows that the Red Team's training has given it the advantage of a concentration of fire in this situation.Real-Time Neuroevolution with rtNEAT
The robots in NERO use artificial neural networks for their "brains", and they learn by means of neuroevolution. Neuroevolution is a genetic algorithm, a type of reinforcement learning algorithm that operates by rewarding the agents in a population that perform the best and punishing those that perform the worst.In NERO the rewards and punishments are specified by the players, by means of the slider controls shown in the screenshot above, on the right-hand side. The genetic algorithm decides which robots' "brains" are the most and least fit on the basis of the robots' behavior and the current settings of the sliders.
For the NERO project we are using a specific neuroevolutionary algorithm called NEAT, Neuro-Evolution of Augmenting Topologies. Unlike most neuroevolutionary algorithms, NEAT starts with an artificial neural network of minimal connectivity and adds complexity only when it helps solve a problem. This helps ensure that the algorithm does not produce unnecessarily complex solutions.
In NERO we are introducing a new real-time variant of NEAT, called rtNEAT, in which a small population evolves while you watch. (Most genetic algorithms use generation-based off-line processing, and only provide a result at the end of some pre-specified amount of training.)
rtNEAT solves several technical challenges. For example, in order to allow continual adaptation, rtNEAT discards the traditional notion of generations for the genetic algorithm, and instead keeps a small population that is evaluated continuously, with regular replacement of the poorest performers. rtNEAT is powerful enough that we are able to work with a population as small as 30 even for non-trivial learning tasks. This allows the entire population to be replaced quickly enough for human viewers to see the population's behavior adapt while they watch.
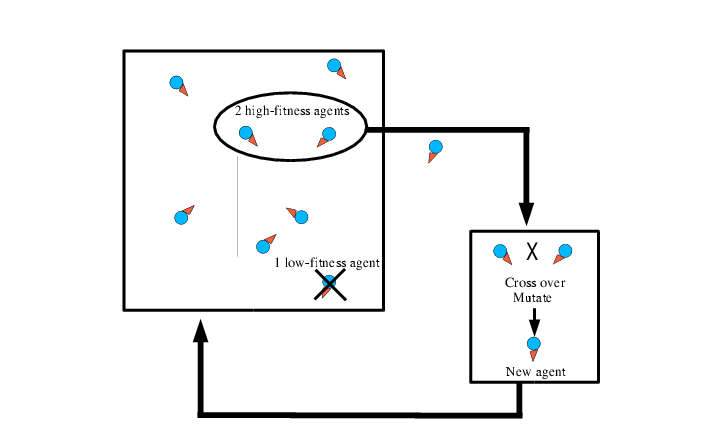
Real-time neuroevolution.
We break up the regimented schedule of generation-based evolution by imposing an artificial lifetime on each "brain" being evaluated. In this example the brains control individual agents in a simulation. Whenever a brain's evaluation lifetime is up, we compare its fitness (based on the agent's performance while "wearing" that brain) to the fitness of other brains in the population. If it is among the least fit brains it is immediately discarded and replaced by breeding two high-fitness brains together using NEAT. Otherwise the brain is put on the shelf, ready to be inserted into another robot for further evaluation when its turn comes up again.Current Status
To date we have worked through several layers of experiments to validate the feasibility of rtNEAT and the NERO game concept, and to iteratively enhance the learning power and resulting intelligence of the NERO agents. We are currently polishing up the game for a public release, and after that we will start a new layer of AI experiments to enhance the power of rtNEAT and the NERO agents' capabilities, and pursue other research projects based on the NERO game.Acknowledgements
Production of the NERO project is funded by the Digital Media Collaboratory and the IC2 Institute of the University of Texas at Austin. The original NEAT research was supported in part by the National Science Foundation and the Texas Higher Education Coordinating Board.NERO is built on the Torque game engine, licensed from GarageGames, Inc.
DANCING NEBULA
When the gods dance...
Sunday, March 25, 2012
NERO TECHNOLOGY TRANSFER EXPERIMENT
via nn.cs.utexas.edu
Subscribe to:
Post Comments (Atom)
No comments:
Post a Comment